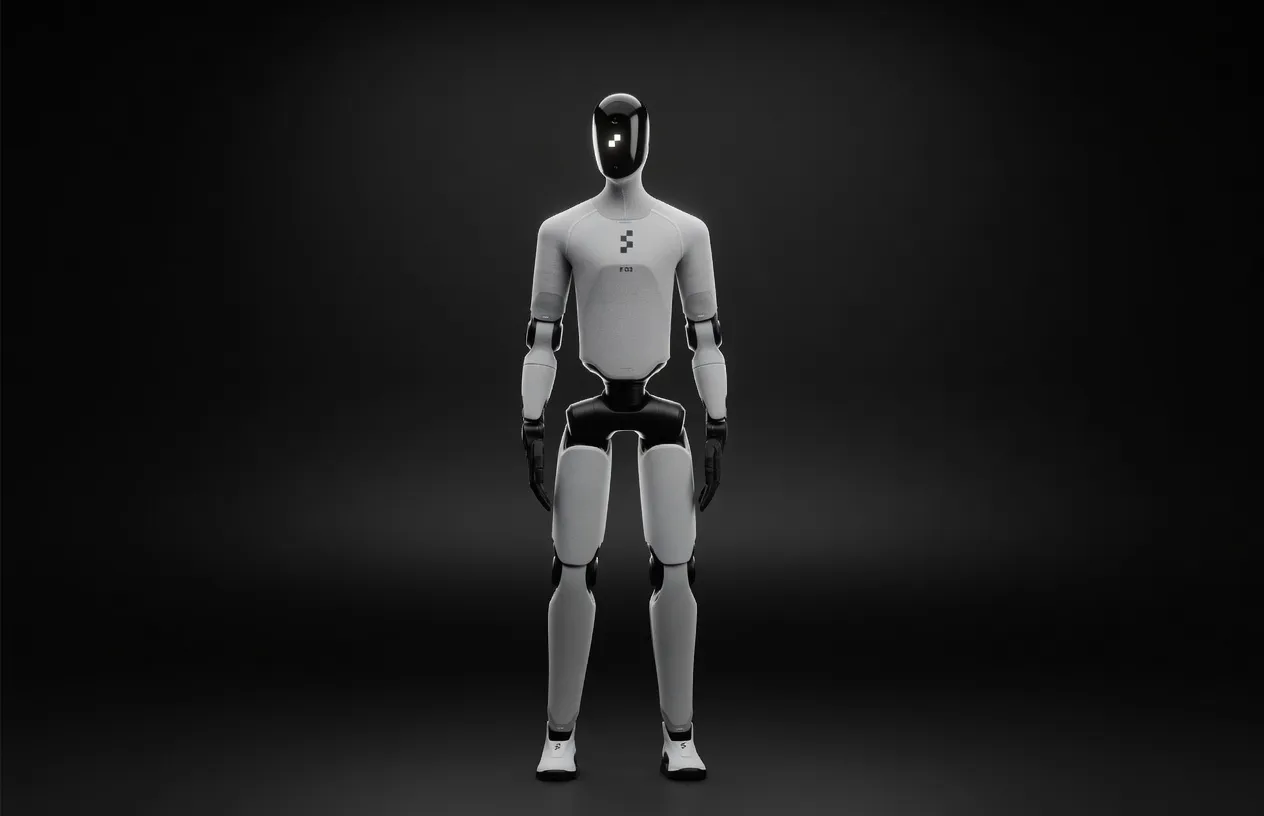
General-purpose humanoid robot designed for logistics, manufacturing, and retail. Features a modular battery system and is being piloted by Mercedes-Benz and GXO Logistics.
The Apptronik Apollo is a general-purpose humanoid robot designed specifically for industrial environments, including logistics, manufacturing, and retail. Unlike specialized robotic arms or automated guided vehicles (AGVs), Apollo is built to operate in human-centric spaces, utilizing a form factor that allows it to navigate and interact with infrastructure originally designed for people. Developed by Austin-based Apptronik, the platform represents a shift toward versatile, multi-tasking robotics capable of executing complex workflows that require both mobility and manipulation.
In the landscape of "best hardware for local AI agents 2025," Apollo stands out by integrating physical embodiment with high-level intelligence. It is currently being piloted by major enterprise players, including Mercedes-Benz and GXO Logistics, to automate repetitive tasks like case picking and palletization. For developers, the Apollo platform is more than a mechanical tool; it is a sophisticated edge device for Apptronik humanoid robots for AI development, designed to bridge the gap between digital reasoning and physical execution.
For AI engineers, the physical specs of a humanoid are only half the story. The real value lies in the onboard compute capability required for real-time perception, path planning, and natural language interaction. While Apptronik has not publicly disclosed the exact silicon architecture (e.g., NVIDIA Jetson Orin vs. custom SoC), the robot's design necessitates high-bandwidth memory and significant TFLOPS to process multi-modal sensor data without round-tripping to the cloud.
Running Apptronik Apollo for AI workloads requires a balance between low-latency inference for motor control and higher-level cognitive processing. To function as an autonomous agent, the onboard compute must handle vision-language models (VLMs) and potential Apptronik Apollo local LLM deployments. In humanoid robotics, Apptronik Apollo VRAM for large language models is the critical bottleneck. To maintain a 1.4 m/s walking speed while avoiding obstacles, the system must prioritize vision pipelines, leaving a specific slice of compute for agentic reasoning.
The "sweet spot" for humanoid robots like Apollo is the deployment of small-to-mid-sized quantized models that can handle "Reasoning-Action" (ReAct) loops. For practitioners looking at Apptronik Apollo AI inference performance, the goal is to minimize the "time to action" rather than maximizing raw Apptronik Apollo tokens per second.
Based on the compute profiles of similar enterprise humanoid platforms, we can project the following model performance:
It is unlikely that the onboard compute of the Apollo is intended for hardware for running 70B parameter models locally at high bit-depths. Models of that scale typically require 40GB+ of VRAM, which creates thermal and power challenges for a mobile robot. Instead, 70B models would likely be handled via a "brain-body" split, where the robot runs a small "reflex" model locally and calls a larger model over a high-speed local network for complex problem-solving.
The Apptronik Apollo is not a consumer toy; it is an enterprise-grade tool for teams building the next generation of embodied AI.
Engineers can use Apollo as a physical sandbox for testing agentic frameworks. If you are developing an autonomous agent that needs to move a 25 kg payload from a conveyor belt to a pallet, Apollo provides the necessary API hooks to translate LLM outputs into ROS (Robot Operating System) commands.
The primary target is the industrial sector. In these environments, the robot acts as a "worker-multiplier." The ability to swap batteries ensures that the robot can work through multiple shifts, a key requirement for ROI in warehouse settings.
Apollo is ideal for "dark warehouse" scenarios where low-latency, local inference is required for safety. By running models locally, the robot avoids the risks associated with Wi-Fi dropouts or cloud latency, which could be catastrophic when the robot is carrying a 55 lb payload near human workers.
When evaluating the best humanoid robots for running AI models locally, Apollo is frequently compared to the Tesla Optimus and Boston Dynamics Atlas (Electric).
For those seeking the best AI chip for local deployment within a robotic frame, Apollo’s value lies in its balance of physical capability (payload and speed) and its readiness for enterprise pilot programs. While it may not be the platform for running massive 70B models locally, it is the premier choice for deploying 8B-14B parameter agents into the physical workforce.
The top models this device can run at 4-bit, ranked by fit and speed.
Specs not available for scoring. This product is missing VRAM or memory bandwidth data.